Азимуты могут быть прямыми и обратными.
Прямой азимут отсчитывается от 0° по ходу часовой стрелки. Он показывает направление от наблюдателя к предмету.
Обратный азимут показывает направление от предмета к наблюдателю.
Чтобы получить обратный азимут, надо к прямому прибавить 180°, если прямой азимут меньше 180°, или вычесть эту величину, если больше 180°.
Например, прямой азимут до одиноко стоящего дерева составляет 330°, тогда обратный азимут будет: 330°-180° =150°.
Дифференциация грубого направления
Эта задача измеряет чувствительность к направлению ускорения вдоль оси, ортогональной прямолинейной. Субъекты испытывали одно движение и указывали, было ли движение в положительном или отрицательном направлении вдоль этой оси. Для движений вдоль межосевой оси они указывали, была ли она влево или вправо; вдоль дорсовентральной оси они указывали вверх или вниз. Каждый 1-й перевод имел профиль скорости Гаусса, аналогичный эксперименту с заголовком. Перемещение варьировалось от испытания к испытанию в соответствии с описанной выше процедурой лестницы.
Чтобы определить на местности азимут с помощью компаса, встают лицом к ориентиру, направление на который надо определить. Отпускают рычажок компаса и, поворачивая, совмещают северный конец стрелки с нулевым делением кольца. Оставляя коробку компаса неподвижной и следя за тем, чтобы стрелка не отходила от нулевого деления, вращают визирное приспособление до наведения мушки на предмет, азимут которого надо определить. Замечают, около какой цифры остановился при этом указатель-треугольник. Это и будет искомый азимут.
Движение без четких ориентиров
В этой задаче испытуемые испытывали два движения в одном направлении, и они указывали на большее из двух. Пьедестал - это движение, которое является общим для двух интервалов. Приращение - это движение, добавленное к пьедесталу. Приращение только заметного стимула относительно ненулевого стимула пьедестала называется порогом приращения. Пиковое ускорение сравнения варьировалось в соответствии с той же процедурой лестницы, описанной выше.
Порядок стандартного и сравнительного перемещений был рандомизирован от испытания к испытанию. Все десять участвовали в эксперименте по борьбе с вестибулярным заголовком. Семь из них участвовали в экспериментах с грубым направлением и амплитудой, что позволило нам сравнить эффективность работы над задачами для этих предметов. Пять из испытуемых участвовали в эксперименте по визуальной дискриминации.
На незнакомой местности часто приходится передвигаться по заранее заданным азимутам. В этих случаях приходится искать с помощью компаса ориентир в заданном направлении. Для этого компас приводят в рабочее состояние, затем делают отсчет азимута и замечают в этом направлении определенный предмет - ориентир. Двигаясь к этому ориентиру, наблюдатель идет по заданному азимуту, только изредка контролируя свое направление по компасу. В лесу и в ночное время движение по азимуту осложняется тем, что местные ориентиры не видны. В этих случаях ориентированный компас постоянно держат перед собой и двигаются ночью в направлении, указываемом специальными светящимися точками на компасе.
Все эксперименты использовались в двух альтернативных процедурах принудительного выбора и поэтому могут быть проанализированы аналогичным образом. Процент ответов для одной альтернативы был отложен в зависимости от переменной стимула, о которой идет речь. Порог определялся как стандартное отклонение наиболее подходящего кумулятивного гауссова.
Этот анализ использовался для проверки гипотез гравитационно-пьедестальной и головной ориентации. Наконец, для прогнозирования пороговых значений заголовка использовались пороги грубого направления. Как показано на рисунке 1, это было сделано для проверки гипотезы о разностном векторе, которая предполагает, что задача заголовка может быть уменьшена до вычисления разностного вектора между стимулами ускорения в двух интервалах и определения направления этого вектора. Обратите внимание, что длина вектора разностей и ортогональная составляющая примерно одинаковы для малых углов, но расходятся по мере увеличения угла заголовка.
Следовательно, сущность движения по азимутам заключается в умении находить на местности нужное направление по заданному азимуту, выдерживать его с помощью компаса и точно выходить к намеченному пункту. Тренировку в работе с компасом удобно проводить на открытой местности с широким кругозором, где много заметных далеких предметов: зданий, отдельных деревьев, труб и т. п. Студенты работают по бригадам. Сначала один человек определяет азимут, называя ориентир, другой откладывает азимут на местности и отыскивает ориентир, третий определяет обратный азимут.
В каких единицах измеряется значение азимута?
Тем не менее, это компонент вектора разности, ортогонального прямому, который несет информацию о направлении направления; компонент, параллельный прямому, не несет никакой информации, относящейся к задаче. В задаче с одним интервалом значение 84% -ной точки на психометрической функции равно стандартным отклонениям базовой оценки. Поэтому порог заголовка, предсказанный из порога грубого направления, равен.
Этот последний результат противоречит гипотезе гравитационно-пьедестала, предполагая, что нервная система компенсирует влияние гравитации на вестибулярные сигналы, первоначально закодированные отолитовыми органами. Этот результат примечателен тем, что это означает, что люди не ограничены в своей способности воспринимать инерционное ускорение благодаря присутствию гравитации, очень полезной адаптации для мира, в котором мы живем.
Для быстрого определения ориентиров надо знать на память направления основных и промежуточных сторон горизонта в градусах: север -0°, восток -90°, юг-180°, запад - 270°, северо-восток- 45°, юго-восток-135°, юго-запад - 225°, северо-запад-315°.
Сущность и порядок движения по азимутам в пешем порядке на открытой местности днем.
Сущность движения по азимутам заключается в нахождении и выдерживании на местности заданных направлений и расстояний, точном выходе в назначенный пункт.
Данные, необходимые для движения по азимутам, подготавливаются по топографическим картам наиболее крупного масштаба.
Средство и стандартные отклонения порогов визуального заголовка, сгруппированные в соответствии с координатами головы, мировыми координатами и ориентацией тела, также суммированы в таблице 2. Сходство этого эффекта для визуальной и вестибулярной классификации указывает на неспецифический эффект ориентации тела по сенсорной обработке для восприятия самодвижения.
Задача о грубом направлении дискриминации
Для моделирования разграничения заголовка величина стимула поддерживалась постоянной, но направление стимула варьировалось в тонких шагах вокруг точки кривых косинусоидальной настройки, где наклон наиболее крутой, а чувствительность к различиям в тонком направлении велика. При пуассоновском шуме стандартное отклонение пропорционально средней скорости стрельбы, поэтому максимальная дискриминация нейронов не возникает в заголовке, который соответствует самой крутой точке кривой настройки, потому что отношение сигнал-шум не является самым низким в этой точке; скорее, точка максимальной чувствительности возникает при несколько более низких скоростях стрельбы.
Рис. 1 Подготовка данных для движения по азимутам
Подготовка данных для движения по азимутам включает:
Изучение местности по топографической карте;
выбор маршрута движения и промежуточных ориентиров на его участках;
определение магнитных азимутов направлений и расстояний между выбранными ориентирами;
оформление данных на карте или составление схемы маршрута движения.
Однако этот эффект невелик, и результат наших симуляций в основном не изменился, когда дискриминация происходила вокруг точек, немного от максимального наклона кривой настройки. Моделирование повторялось в различных условиях, чтобы исследовать влияние нейрональной настройки и шумовых свойств. В частности, мы вначале исследовали, были ли сопоставления по курсу и грубой дискриминации для простейшей возможной модели: функция амплитудно-отклика была линейной, а шум был гауссов с фиксированной дисперсией.
Мы также позволили шумовым свойствам нейронов быть пуассоном, аналогичным тому, что наблюдается в кортикальных нейронах. Кроме того, мы позволили нелинейной амплитудно-откликовой функции использовать модель гиперболического отношения. Мы включили нелинейность по нескольким причинам. Во-первых, все нейроны работают в пределах ограниченного динамического диапазона скоростей стрельбы.
На карте намечают маршрут движения с четкими ориентирами на поворотах и измеряют дирекционный угол и длину каждого прямолинейного участка маршрута. Дирекционные углы переводят в магнитные азимуты, а расстояния при движении в пешем порядке - в пары шагов, при совершении марша на машинах - в показаниях спидометра. Данные для движения по азимутам оформляют на карте, а при ее отсутствии составляют схему маршрута с таблицей.
Во-вторых, с учетом косинусоидальных нейронов нелинейная функция амплитудно-отклика была единственным способом получения существенно разных скоростей стрельбы в моделировании и симуляции грубой дискриминации. Однако это свойство еще не было охарактеризовано для центральных вестибулярных нейронов. С линейной амплитудно-откликовой функцией и постоянными гауссов-распределенными помехами, заголовок и грубые дискриминационные пороги соответствовали близко, как описано. Это согласуется с интуицией, проиллюстрированной на рисунке 1, что дискриминация по теме ограничена чувствительностью к ортогональной составляющей силы инерции.
Движение по азимутам пешим порядком по заранее составленной схеме маршрута выполняется в следующей последовательности: У исходного ориентира (№1) (рис. 1) с помощью компаса определяют азимут направления движения к ориентиру №2.В этом направлении выбирают какой-либо удаленный вспомогательный ориентир и начинают движение.
Дойдя до ориентира (№2), уточнив свое местоположение, вновь определяют по компасу направление движения до следующего ориентира (№3) и т.д.
Точность выхода к точкам поворота маршрута при движении по азимутам зависит от характера местности, условий видимости, ошибок определения направлении движения и измерения расстояния.
Обычно отклонение от точки поворота, к которой надо выйти, не превышает 1/10 пройденного расстояния, то есть 100 м на каждый километр пройденного пути.
Поэтому, если заданное расстояние пройдено, а намеченного ориентира не видно, его следует искать в пределах окружности, радиус которой равен 1/10 расстояния, пройденного от предыдущей точки поворота.
В некоторых случаях, например, при движении по азимутам зимой на лыжах, расстояния измеряют приближенно по времени и скорости движения. Чтобы избежать потери ориентировки из-за неточности измерения расстояний, на точках поворота надо выбирать хорошо видимые издали вспомогательные ориентиры.
Это, в свою очередь, имитирует поведение афористов отолитов, которые функционируют как одномерные акселерометры. Судебная изменчивость скорости стрельбы до сих пор не определена количественно для вестибулярных афферентов, но может случиться так, что регулярные афферентные нейроны проявляют постоянные гауссовские шумовые свойства.
Пороги дискриминации ни направления, ни грубой направленности не зависели от направления движения в мировых координатах и не были подняты, когда инерционное ускорение было коллинеарным с гравитацией. Это открытие удивительно, учитывая, что отолиты отвечают эквивалентно гравитационным и инерционным ускорениям. Наши данные свидетельствуют о существовании механизмов, которые компенсируют влияние силы тяжести на периферические органы чувств. Ранее сообщалось об аналогичных эффектах.
Чтобы легче выдержать направление движения, кроме промежуточных часто используют вспомогательные ориентиры. Такими ориентирами служат обычно небесные светила: Солнце, Луна и яркие звезды. При пользовании ими необходимо примерно через 15 мин проверять азимут направления движения, так как небесные светила (кроме Полярной звезды) перемещаются по небосводу. Если долго двигаться в их направлении без контроля, можно значительно уклониться от маршрута.
Мы также обнаружили, что пороговые значения для заголовка и грубой дискриминации зависят от ориентации тела относительно силы тяжести с более низкими порогами для вертикальной ориентации, чем ориентация вниз. Это также наблюдалось для дискриминации визуального заголовка. Лучшая работа с головой и телом в вертикальном положении не удивительна, потому что у людей гораздо больше опыта, оценивающих направление движения в вертикальном положении. Поскольку этот эффект наблюдается как для визуальной, так и для вестибулярной дискриминации, это может быть связано с ориентацией на ориентацию тела на мультимодальные механизмы пространственной ориентации, а не на модальные специфические сенсорные механизмы.
Обход препятствий. Нахождение обратного пути.
Порядок обхода зависит от размеров и характера препятствия.
Если противоположная сторона препятствия видна
(рис. 2), то в точке А записывают количество пройденных пар шагов. Затем замечают ориентир (точку Б) на противоположной стороне препятствия по направлению движения.
Одним из методов определяют расстояние до намеченного ориентира, переводят это расстояние в пары шагов и прибавляют к ранее измеренному по маршруту расстоянию до точки А.
После этого обходят препятствие по его границе. В точке Б по заданному азимуту находят нужное направление и продолжают движение к очередной точке поворота маршрута.
Альтернативно, эффект ориентации тела может быть обусловлен когнитивными факторами. Например, наблюдатели могут просто быть менее физически физически и, следовательно, менее способны концентрироваться, если ориентироваться в сторону относительно тяжести. Однако это объяснение несовместимо с результатами эксперимента по амплификации, в котором не наблюдалось влияния ориентации тела. И это не может объяснить наблюдение, что эффект ориентации тела больше для дискриминации вестибулярного направления, чем для дискриминации грубого направления.
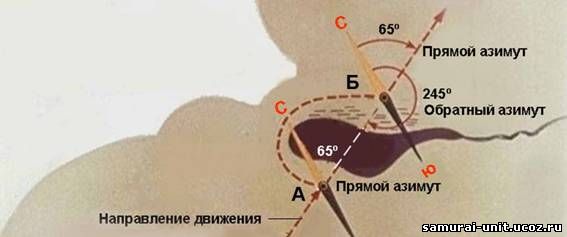
Рис. 2. Обход препятствия если его противоположная сторона видна
Если противоположная сторона препятствия не видна
(рис. 2), то при выходе в точку 1 изучают местность и намечают сторону, по которой легче обойти препятствие. После этого по компасу определяют азимут направления вдоль границы препятствия (145°) и начинают движение, ведя счет парам шагов (180 пш.). При этом необходимо строго выдерживать прямолинейность движения.
На правой границе препятствия в точке 2 (любая точка на местности) делают остановку и определяют направление движения по азимуту, соответствующему направлению основного маршрута (65°). По этому направлению движутся до выхода за препятствие (до точки 3).
Как определить азимут с помощью транспортира по топографической карте?
Еще одно возможное объяснение лучшей производительности при вертикальном положении заключается в том, что способность наблюдателей разрешать гравито-инерционную силу на отдельные компоненты может зависеть от ориентации тела. Грубая дискриминация может опираться более непосредственно на сигналы линейного ускорения и может не зависеть от оценок траектории трехмерного движения. Чтобы оценить эту гипотезу, необходимо было бы прямо изучить, в какой степени способность наблюдателей разрешать чистое линейное ускорение в гравитационные и инерционные компоненты зависит от ориентации тела.
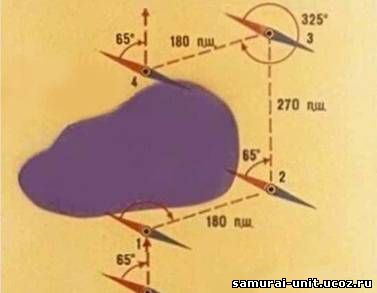
Рис. 3. Обход препятствия способом параллелограмм
В точке 3 определяют направление движения, параллельное линии 1-2, т. е. обратный азимут направления 1-2 (325°).
Двигаясь по направлению линии 3-4, отсчитывают количество пар шагов, равное измеренному по линии 1-2, т. е. 180 пары шагов.
В точке 4 определяют по азимуту направление движения, соответствующее направлению движения до выхода к препятствию (65°).
Затем к количеству пар шагов, измеренному до точки 1, прибавляют расстояние 1-2 (270 пар шагов) и продолжают движение к намеченной ранее точке поворота маршрута.
В некоторых случаях, например для отыскания обратного пути (возвращения в исходную точку), используют обратный магнитный азимут
, который отличается от прямого на 180°.
Наконец, наш вывод о том, что дискриминация визуального заголовка не зависит от направления движения в координатах головы или мира, противоречит единственному предыдущему исследованию, - что он изучил различия в визуальной дискриминации азимута и высоты курса. Они сообщили, что чувствительность хуже для высоты, чем для азимута. Мы оценили направление дискриминации прямо.
Они оценивали чувствительность при гораздо больших эксцентриситетах. У нас есть вопрос от читателя о движении заката или восхода солнца по горизонту, так как Земля движется между двумя годами. Ответ заключается в том, что степень движения Солнца вдоль горизонта зависит от двух факторов.
Чтобы определить обратный азимут, нужно к прямому азимуту прибавить 180°, если он меньше 180°, или вычесть 180°, если он больше 180°.
Для возвращения из пункта № 5 в пункт № 1 (рис. 1) обратные азимуты будут следующие:
| № точки | Участок пути | Магнитный азимут (градусы) | Расстояние (пары шагов) | Обратный магнитный азимут |
| 1 | Перекрёсток - Геодезический пункт | 83 | 1266 | 88+180=268 |
| 2 | Геодезический пункт - Брод | 73 | 1360 | 73+180=253 |
| 3 | Брод - Сарай | 105 | 1499 | 105+180=285 |
| 4 | Сарай - Камень | 67 | 980 | 67+180=247 |
Азимут - это угол, образуемый между направлением на какой-либо пред-
мет местности и направлением на север.
Азимуты отсчитываются от 0 до 360ё по ходу часовой стрелки.
Движение Солнца вдоль вашего горизонта - на восходе или закате - является наиболее ощутимым вокруг равноденствий и наименее ощутимым вокруг солнцестояний. Кроме того, ежедневное изменение положения Солнца вдоль горизонта больше, чем дальше на север или на юг от земного экватора.
Порядок выполнения норматива
В 65 градусах северной широты солнце также поднимается на восток и наступает на запад в день равноденствия. В середине северных широт есть период от двух до трех недель, где вы, вероятно, не заметите никакого движения солнца по горизонту, сосредоточенного на солнцестоянии.
Определение азимута по компасу
Чтобы определить азимут на местности, надо:
- стать лицом в направлении предмета, на который требуется определить
азимут;
- ориентировать компас, то есть подвести его нулевое деление (или
букву С) под затемненный конец стрелки компаса;
- вращая компасную крышку, направить на предмет визирное приспособле-
ние;
- против указателя визирного приспособления, обращенного к предмету,
прочесть величину азимута.
Чтобы определить на местности заданный азимут, надо:
- установить указатель визирного приспособления компаса точкой над
делением, соответствующим величине заданного азимута;
- повернуть компас так, чтобы указатель визира находился впереди;
- поворачиваться самому вместе с компасом до тех пор, пока нулевая
точка не совпадет с северным концом стрелки; направление указателя визи-
ра и будет направлением по заданному азимуту.
Совмещение визирной линии с направлением на предмет (цель) достигает-
ся многократным переводом взгляда с визирной линии на цель и обратно. Не
рекомендуется поднимать компас до уровня глаз, снижается точность изме-
рения. Точность измерения азимутов с помощью компаса Андрианова состав-
ляет плюс-минус 2-3ё.
Движение по азимуту
Для движения по заданному азимуту надо:
- изучить на карте местность между исходным и конечным пунктами дви-
жения и наметить маршрут, легко распознаваемый по местным предметам;
- начертить избранный маршрут на карте и определить азимуты всех
звеньев маршрута;
- определить на карте длину каждого звена маршрута в шагах (пара ша-
гов в среднем равна 1,5 м);
- все данные для движения записать в полевую книжку в виде таблицы
или схематичного чертежа.
Придя на исходный пункт, следует:
- ориентироваться по компасу;
- установить указатель подвижного кольца компаса против отсчета, рав-
ного величине азимута первого звена маршрута (в нашем примере - 335ё);
- плавно поворачивать компас до тех пор, пока нулевое деление не сов-
падет с северным концом стрелки; тогда визирное приспособление будет по-
казывать направление движения по азимуту - 335ё;
- в этом направлении выбрать какой-нибудь предмет и идти на него. По-
дойдя к предмету, нужно проверить ориентировку компаса и продолжить путь
до первой поворотной точки;
- у первой поворотной точки нужно установить по компасу азимут на
следующий поворотный пункт и двигаться на него так же, как из исходного
пункта.
Определение азимутов на карте транспортиром
Вначале выбранные по маршруту движения ориентиры соединяют прямой ли-
нией, но так, чтобы эта линия пересекала хотя бы одну из вертикальных
линий километровой сетки.
Затем измеряют транспортиром угол от северного направления верти-
кальной линии километровой сетки по ходу часовой стрелки до направления
на предмет. При этом транспортир прикладывается к вертикальной линии ки-
лометровой сетки так, чтобы риска (черточка) на линейке транспортира
совпадала с той точкой, где прочерченное направление пересекает верти-
кальную линию километровой сетки, а крайние деления транспортира (0 и
180) совместились с направлением этой линии.
На рисунке по направлению "сарай - овраг" азимут равен 65ё, по нап-
равлению "сарай - мост" 274ё 080ё+94ё= 274ё).
Далее, уменьшив или увеличив измеренные углы на величину отклонения
магнитной стрелки, получим магнитные азимуты.
Отклонением магнитной стрелки или поправкой направления называют угол
между вертикальной линией километровой сетки и стрелкой компаса (магнит-
ным меридианом). Данные о величине склонения стрелки всегда даются под
южной (нижней) стороной рамки карты в виде схемы и текста.
Определение магнитных азимутов
Выполняется в отличие от вышеизложенного на ориентированной карте с
учетом магнитного склонения. Магнитное склонение бывает или восточное со
знаком "+" или западное со знаком "-". Зная величину и знакотклонения
нетрудно совместить направление одной из сторон рамки листа карты (за-
падное или восточное) с направлением истинного меридиана
При совмещенном положении сторон рамки карты с направлением истинного
меридиана карта будет ориентирована точно.
Практически это делают так:
- установить на одну из боковых сторон карты компас так, чтобы линия
север-юг шкалы компаса совпала с направлением этой стороны рамки, а ноль
(С) на шкале был направлен к северной стороне рамки карты;
- отпустить тормоз стрелки компаса и, когда стрелка успокоится, пово-
рачивать карту до тех пор, пока стрелка не станет своим северным концом
против нулевого деления (С) шкалы компаса,
- повернуть карту не сдвигая компаса так, чтобы северный конец стрел-
ки встал против деления соответствующего величине и знаку склонения для
данного листа карты.
- ориентированную таким образом карту закрепляют;
- соединить прямыми линиями ориентиры: овраг - сарай, сарай - камень;
- установить компас на прочерченной прямой между ориентиром так, что-
бы линия "север-юг" шкалы совпала с этим направлением, а нулевое деление
(С) было направлено в сторону движения;
- когда стрелка успокоится, сделать отсчет по шкале против северного
конца стрелки; вычесть полученный отсчет из 360ё, эта разность и будет
магнитный азимут.
Измерение расстояния между ориентирами
Измерение расстояния между ориентирами выполняют так:
- определяют длину отрезков на карте циркулем или линейкой;
- пользуясь масштабом карты, узнают какому расстоянию соответствуют
отрезки на местности;
Например, на карте масштаба 1: 25 000 измеренное расстояние между
двумя ориентирами равно 6,4 см. Величина масштаба 250 м в 1 см.
Расстояние будет 250 х 6,4 = 1600 м.
Данные необходимые для движения оформляют в специально составленной
схеме маршрута, или в виде таблицы.
Движение начинают с нахождения нужного азимута направления движения.
В направлении движения желательно выбрать и запомнить возможно более
удаленный ориентир. В движении ведут отсчет пройденного расстояния
(обычно парами шагов).
В случае если ориентир не окажется в данной точке, в точке выхода ос-
тавляют знак, или одного-двух бойцов, а ориентир разыскивают в радиусе
равном 0,1 расстояния пройденного от предыдущего ориентира.
В движении используют дополнительные ориентиры: линии электропередач,
реки, дороги и т.п.
Обход препятствий в зависимости от условий может совершаться одним из
следующим способов:
При наличии видимости через препятствие:
- заметить ориентир по направлению движения на противоположной сторо-
не препятствия;
- обойти препятствие и продолжить движение от замеченного ориентира,
ширину препятствия определить любым способом и прибавить к пройденному
расстоянию;
При отсутствии видимости через препятствие, например, при обходе лес-
ного завала, а также в условиях ограниченной видимости: туман, дождь и
т.д.
Допустим, что движение совершалось по азимуту 65ё и до остановки пе-
ред препятствием пройдено 340 пар шагов. После изучения местности было
решено обход совершать с правой стороны. Определить по компасу азимут
направления вдоль препятствия (от точки 1 на точку 2), продолжить движе-
ние по этому направлению, ведя счет парам шагов до правой границы пре-
пятствия. На рисунке азимут равен 145ё, а пройденное расстояние - 180
пар шагов. Сделав остановку в точке 2, определяют по компасу направление
соответствующее первоначальному азимуту, по которому совершалось движе-
ние до препятствия (65ё) и продолжают двигаться до выхода за пре-
пятствие. Счет парами шагов ведется от точки 2 до точки остановки за
препятствием (точка 3). На рисунке пройденное расстояние равно 270 пар
шагов. Из точки 3 движение совершается влево по обратному азимуту нап-
равления от точки 1 до точки 2 (на рисунке обратный азимут равен 325ё)
до тех пор, пока не будет пройдено расстояние, равное 180 пар шагов (на
рисунке до точки 4). На точке 4 определяют направление по первоначально-
му азимуту (65ё) и прибавив к пройденному расстоянию до препятствия
расстояние от точки 2 до точки 3, продолжают движение к новому ориенти-
ру.
Бойцам надо запомнить, что обратный азимут отличается от прямого на
180 градусов. Например, Ам = 330, обратный азимут будет 330-180 = 150 Ам
= 30, обратный будет 180+30 = 210.
Перевод длины каждого участка между ориентирами в пары шагов: от ори-
ентира 1 до ориентира 2 будет 1200м. 1200: 1,5 = 800 п.ш. (1,5 м - сред-
няя длина 2-х пар шагов).
Нанесение обнаруженного объекта на карту
Это один из важнейших моментов в работе разведчика. От того, нас-
колько точно объект (цель) будет нанесен на карту, зависит точность оп-
ределения его координат. Ошибка вызовет огонь средств поражения по пус-
тому месту.
Обнаружив объект (цель), разведчик должен сначала точно определить по
различным признакам, что обнаружено. Затем, не прекращая наблюдение за
объектом и не обнаруживая себя, нанести объект на карту.
Для нанесения объекта на карту существуют несколько способов.
Глазомерно: объект наносится на карту, если он находится вблизи из-
вестного ориентира.
По направлению и расстоянию: ориентировать карту, найти на ней точку
своего стояния, свизировать на карте направление на обнаруженный объект
и прочертить линию, определить расстояние до объекта, отложить это расс-
тояние на карте от точки стояния. Полученная точка и будет положение
объекта на карте. Если таким образом графически невозможно решить задачу
(мешает противник, плохая видимость и др.), то нужно точно измерить ази-
мут на объект, затем перевести его в дирекционный угол и прочертить на
карте из точки стояния направление, на котором отложить расстояние до
объекта. Чтобы получить дирекционный угол, надо к магнитному азимуту
прибавить магнитное склонение данной карты (поправка направления).
Прямой засечкой. Этим способом наносят объект на карту из 2-х-3-х то-
чек, с которых можно вести наблюдение за ним. Для этого из каждой выб-
ранной точки прочерчивается на ориентированной карте направление на
объект, тогда пересечение прямых определяет местонахождение объекта.